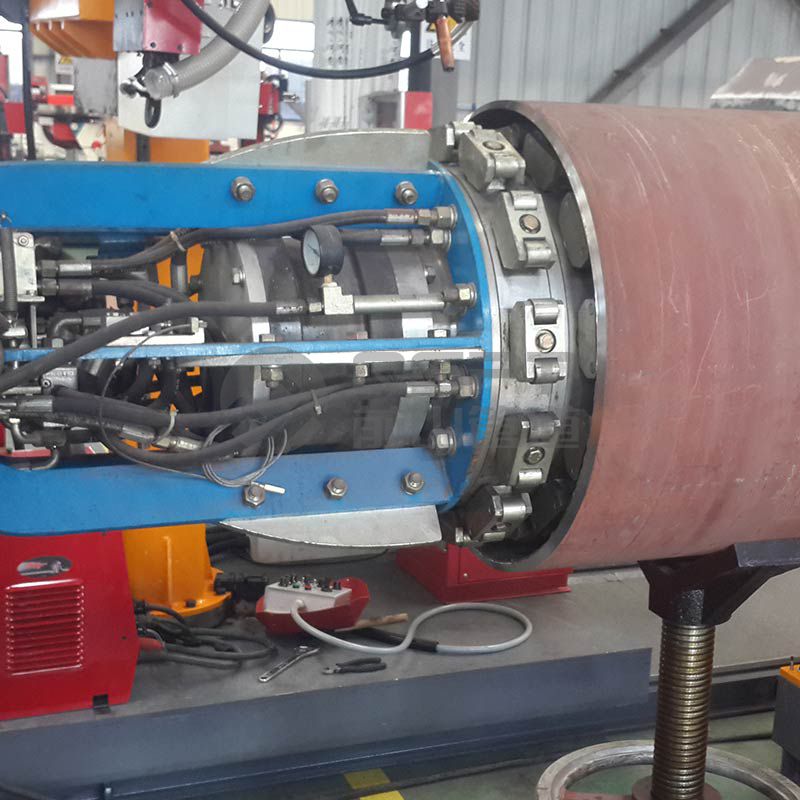
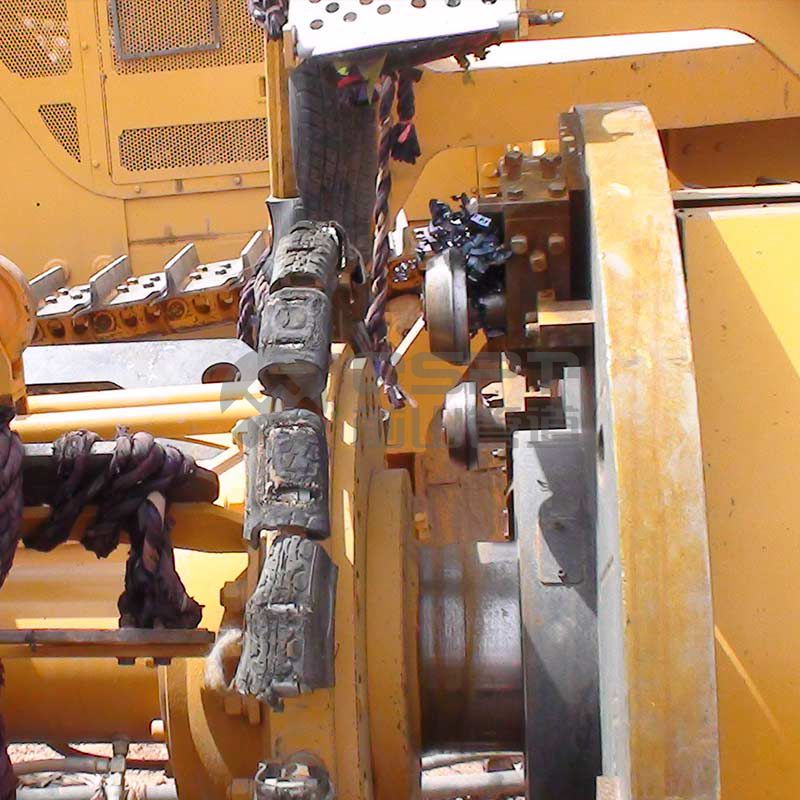
The magnetic type pipe all-position welding machine (MCU type) (hereinafter referred to as the welding machine) uses 4 magnetic suction wheels to firmly adsorb the welding trolley on the pipe surface, The magnetic suction wheel is driven to rotate by DC stepping motor and worm gear mechanism, so the welding trolley can crawl on the surface of the pipe.
The welding machine uses DC stepper motor + linear guide rail + ball screw to realize longitudinal convey of the nozzle mechanism, so as to facilitate the alignment of the welding gun to the weld.
The welding machine has a specific longitudinal displacement to realize the longitudinal swing of the nozzle mechanism so that the welding gun can swing and weld.
")
The welding machine uses DC stepping motor + worm gear and worm mechanism to adjust the Angle of the torch head mechanism. The radial displacement of nozzle mechanism is realized by using DC stepping motor + bevel gear + trapezoidal screw.
The welding machine uses the gas protection welding power supply, the gas protection wire mechanism and the special gas protection welding gun to realize the gas protection filling and the cover welding. If selected with specific welding power supply (such as: Kembe FastMig M420, X350, Sigma Migatnik Select 400), can achieve the backing welding.
The welding machine uses the action control circuit board installed in the welding trolley, the welding control circuit board installed in the welding power supply and the blind wireless remote control (for PAAWM-00DC, the U disk can import the computer-programmed welding parameters into the action control circuit board) to realize the welding action control and welding parameter adjustment.
 2022-10-28
2022-10-28